You can download the complete source codes of the Silverlight solution directories of this chapter.
When you have installed Visual Web Developer 2010 Express plus Web Platform, you unzip the directories and click ***.sln.
The average filter and its variations give an equal vote to all neighbors
around the center of the rectangular filter kernel.
A better idea is to give more power to near neighbors than to distant ones.
A Gaussian distribution clustered around the kernel center is an
intelligent way to distribute graded power to near and distant neighbors.
The declining voting power from center to periphery can be graded between completely flat a = 0.0
(→ average filter) and extremely steep a >> 10 (→ no filtering at all).
Terms: Kernelk: rectangular window carrying the filter area with
an odd integer kw = kernel width and an odd integer kh = kernel height. integer kwh = kw/2 = half of kernel width and integer khh = kh/2 = half of kernel height and integer -kw <= xx <= kw → horizontally running index and integer -kh <= yy <= kh → vertically running index.
The adress of the kernel center is [0,0].
The kernel can be empty just marking a neighborhood or
the kernel can be a matrix of relative power values = votes. Vote: numerical value of a kernel position carrying its relative power
compared to the center.
Drag the slider to compute a 5x5 Gaussian kernel !
//C#-Code of the 5x5 Gaussian kernel program:
double stdDev = stdDevSlider.Value, steepness;
steepness = - 1.0 / ( 2.0 * stdDev * stdDev ); //stdDev != 0
int votes, sum = 0;
for ( int y=-2; y <= 2; y++ )
for ( int x=-2; x <= 2; x++ )
{ votes = Convert.ToInt32( 100 * Math.Exp( steepness*(x*x + y*y) ) );
votesTextBox[y+2,x+2].Text = votes.ToString();
sum += votes;
}
sumTextBox.Text = "Sum of Votes = " + sum.ToString();
The Slow Gauss Filter with Real Images
******************************************************************************************************
How to use the demo programm:
The "Open Image"-button, both large text boxes and the three sliders are self explaining.
But underneath the lowest slider appear a tiny gray-value image and a lowest vote" text box.
1,
The tiny gray-value image size changes when you drag the FilterWidth- and/or the FilterHeight-slider.
Its size grows and shrinks proportional to the filter size.
2.
The Std.Dev.-slider influences the size of the displayed white spot.
Std.Dev. = 0.0 produces just one white pixel centrally while Std.Dev. = 158 fills the image completely with white pixels.
Let's call it the kernel image because it shows the ground-plan of the 2D-Gaussian bell in the limits of the filter size.
A white pixel denotes a voting power of 100% and a black pixel denotes 0% which means no vote at all.
3.
The lowest vote" text box displays the value of the pixel in the upper left corner of the kernel image.
No other pixel is farer away from the center.
When its vote is 0, the filter size is unnecessarily big compared with the Std.Dev.
When its vote is >> 1, the filter is too small to contain the bell.
Caution: It makes little sense to choose a big filter size together with a small standard deviation.
or to choose a big standard deviation together with a small filter.
The demo program doesn't prevent you from such nonsense.
In order not to confuse their customers, commercial fast Gauss filters let you choose either the filter size or the standard deviation.
In the first case they compute a standard deviation fitting to the filter size with a lowest vote of 1.
In the second case they compute a quadratic filter fitting to the bell so that its lowest vote comes out to be about 1 again.
******************************************************************************************************
Experiments:
1. Drag the Std.Dev. slider between 0.00 and 158.
Observe the small image underneath the Std.Dev. slider and the "lowest vote" textbox.
A low standard deviation produces a black image with a white spot,
but high standard deviations produce a almost white image.
2. A standard deviation of 0 doesn't filter at all regardeless of the filter size.
3. A filter size of 1x1 doesn't filter at all regardeless of the standard deviation.
4. A result of filtering with standard deviations with lowest votes > 90 is almost identical with average filtering.
5. With standard deviations < 1.0 nothing changes when the filter size increases > 5.
******************************************************************************************************
The Fast Gauss Filter 1D
Unfortunately the Gauss filter is slow because it needs N2 multiplications and additions per pixel (N being the size of a quadratic kernel).
Prof. Vladimir Kovalevsky published the following idea to fasten it: The Fast Gauss Filter.
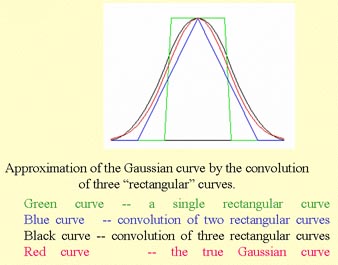
Quotation: "There is a possibility to obtain approximately the same results while using the knowledge of the statistics
which says that the convolution of many equivalent probability distributions tends to the Gaussian distribution.
The convergence of this process is so fast, that it is sufficient to calculate the convolution
of only three "rectangular" distributions to obtain a good approximation.
Thus to perform a Gaussian filtering of an image it is sufficient to filter the image three times by a fast averaging filter.
This procedure needs 4*3=12 additions per pixel independently from the size of the window."
The following Silverlight applet let you verify Kovalevsky's idea:
Guidance:
1. At first you just see a vertical white bar in the middle of the black canvas.
This
white bar in the mid of an 1D-array of (invisible) black bars visualizes a perfectly focused optical spot.
2. Click the Button "Average Filter !" to start and whenever you have changed one of the 3 sliders.
3. There are 4 resulting drawings:
3.1. A set of symetrically distributed gray columns showing the effect of repeated average filtering.
3.2. A red hull curve that connects the top center points of all columns.
3.3. A green hull curve that represents the best fitting Gaussian bell curve.
3.4. A text box on the left with a green figure showning the standard deviation.
4. There are three sliders for paramter input.
4.1. The Columns slider: Chooses the length of the 1D pixel array. Each single column narrows when the array grows.
4.2. The Filter Width slider: Chooses the kernel size of the 1D average filter.
4.3. The Repetitions slider: Chooses the no of repetitions of the average filter.
******************************************************************************************************
Experiments:
1. Drag the Columns slider between 13 and 101 and click "Average Filter !".
It just stretches the canvas horizontally but doesn't change the final StdDev figure.
A small StdDev can better be observed with a few fat columns whereas big ones need a long array.
2. Set Columns to 101 and drag the Filter Width slider between 3 and 49 and notice the growing filter effect.
3. Set Columns to 101 and drag the Repetitions slider between 3 and 25 and notice the growing filter effect.
4. Notice that the Fast Gauss Filter just realizes some specific StdDevs with unreachable StdDevs between.
5. Notice that large StdDevs can be realized with big Filter Width or with high Repetions (or both).
6. Notice that 3 Repetitions are enough for good bell curve approximations.
******************************************************************************************************
The Fast Gauss Filter with Real Images
Heavy blurring can be achieved by a big average filter and/or many repetitions.
Using the fast average filter, big filter sizes take the same time as small ones but many repetitions haevily matter.
Furthermore the border problem occurs at any repetition. Each shrinks the averaged result by half of theaverage filter size.
For sake of velocity and narrow borders we therefore restrict the repetition rate to 3.
This restricts us to just a few standard deviations: 1.6, 2.7, 3.8 etc.
Guidance:
1. Drag the Quadratic Filter Width slider.
2. Open more JPG ot PNG images.
******************************************************************************************************
Experiments:
Drag the Quadratic Filter Width slider between 3 and 31 and notice:
1. Blurring depends on the average filter size.
2. The size of the Eqivalent Gauss Kernel depends on the average filter size.
3. The Eqivalent Gauss Kernel standard deviation depends on the average filter size.
4. The fast Gauss filter is about 5-10 times faster than the equivalent simple filter.
5. Filtering time depends on the image size but not on the average filter size.
6. The fast Gauss filter has a big border problem that the simple filter hasn't.
The thickness of the black borders is triple of the average filter half size.
e.g. The 31*31 filter has a border thickness of 15+15+15 = 45.
Solutions of the border problem:
1. Fast by copy: same solution as with the fast average filter (see; Average Filter).
2. Slow by additional simple Gauss filtering inside the border areas before or after fast filtering.
Questions & Answers
******************************************************************************************************
Q: What is a Gauss Filter ?
A: It mimics an optical point spread function by giving near neighbours more influence than distant ones.
Its weight values are Gauss-distributed in
rotational symmetry around the center of a rectangular kernel: votes = maxVote*e-d*d/(2*sigma*sigma).
where d = distance from the center pixel and sigma = selected standard deviation. votes are relative weights in percents and maxVote=100%.
******************************************************************************************************
Q: How to design a Gauss filter kernel ?
A:
1. Choose a reasonable standard deviation sigma.
2. Choose a quadratic filter kernel size so that even the most distant neighbors will obtain a small amount of votes.
3. Choose the no of votes of the center of the kernel = maxVote: e,g.: 1.0 or 100 or 255.
3. For each neighbor(xx,yy) abround the kernel center(x,y): dx=x-xx; dy=y-yy; d(x,y)=SquareRoot(dx*dx+dy*dy).
dd = d(x,y)*d(x,y); ss = sigma*sigma;
vote(x,y) = maxVote* e-dd/(2*ss).
******************************************************************************************************
Q: What is the fast Gauss filter ? Disadvantages compared to the slow Gauss filter ?
A: Repeating the fast average filter 3 times produces nearly the same blurring as a Gauss filter does,
but is 5-10 times faster.
Disadvantages:
1. Any fast gauss filter just has one fixed standard deviation depending on its filter size and repetition rate.
2. Thick black borders remain unfiltered and must be post-processed.
******************************************************************************************************
Q: Usual fast Gauss filters just use three repetitions of the fast average filter. Why ?
A; Heavy blurring can be achieved by many repetitons of a small filter or by few repetitons of a big filter.
More repetitons take more time but an increased filter size doesn't.
Consequence: It saves time to increase filter size instead of the repetiton rate.